

 Home
Home

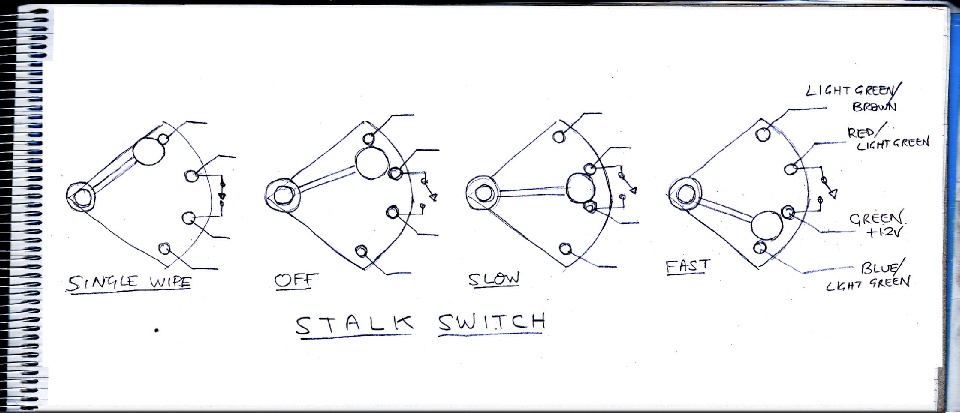
The above sketch shows how the stalk switch works. The switch lever moves a small brass cylinder between four contacts shorting each together in turn. The exception to this is that when the cylinder is pushed passed contact 1 (into the single wipe position) two extra contacts between main contacts 2 and 3 close thus shorting them together.
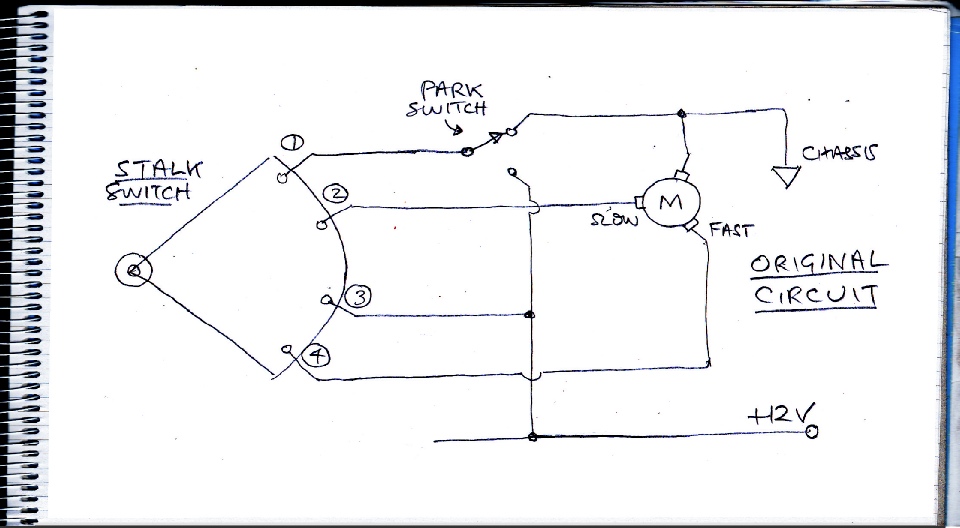
Above is the circuit including the stalk switch and the motor. The two-
If the stalk is in the off position 1 and 2 are connected so if the motor is not parked the slow connection gets 12 volts until the park position is reached when the switch changes over and the slow motor terminal gets connected to 0 volts so the motor is short circuited. This is a form of magnetic braking which stops the motor dead in the park position.
If the stalk is in the slow position, contacts 2 and 3 are shorted together feeding 12 volts to the motor slow connection (the park switch is not connected and has no effect).
If the stalk is in the fast position, contacts 3 and 4 are shorted together feeding 12 volts to the fast connection.
In my circuit, I use connections from contacts 2 and 3 to feed slow and fast signals (via opto isolators which cut out any electrical noise and translate the voltage to 5 volts) to the Arduino. I cut the park switch connection to the stalk and feed it into an Arduino input (again via an opto isolator).
Original wiper circuit
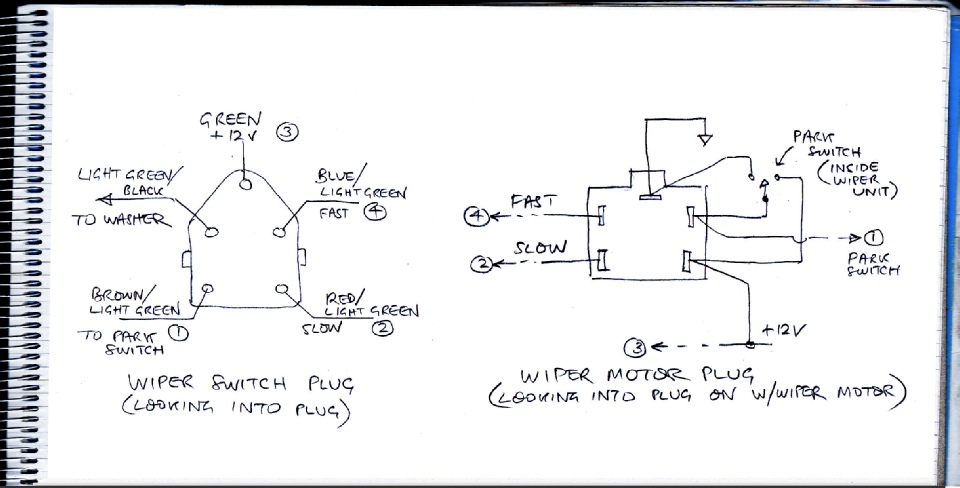
Left are the details of the connectors to the stalk switch and the wiper motor for the sake of completeness.
Next come details of my circuit…
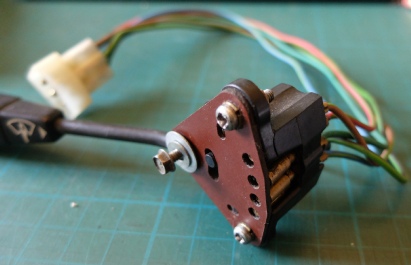



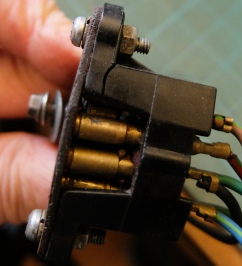
Some of this switchgear can be pretty unreliable, although to be fair, it is about 35 years old. With this crack the switch still sort of worked but the electrical contacts were unreliable.
These are the 4 contacts
This spring moves to connect the two middle contacts when the stalk is in the single wipe position
Not touching
Touching!
Stalk switch
Below, how the stalk switch works
Below, details of the connectors to the stalk switch and the wiper motor.