
 Home
Home



Under construction
During the testing process one or two issues cropped up. When the processor was reset, the relays clicked on and off. My first thought was that I had forgotten the pull-
I then took a wrong turn which wasted a lot of time! I felt convinced that all output pins on the Feather went high during reset. I noticed that the red LED on the Feather flashes during reset. However, on the bread-
All this conjecturing proved to be beside the point when I finally realised I had connected one of the relays to pin 13, which has the on-
Feather controller testing and completion
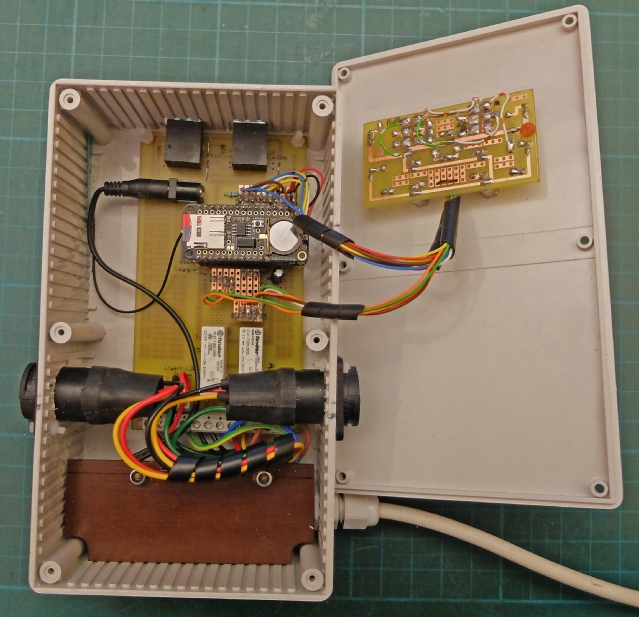
Too many PCB alterations!
Real time clock battery.
SD card to store on/off times etc.
Adafruit Adalogger with Feather underneath.
Sockets for I2C.
Relays
Power supply for Feather under this cover.
WiFi antenna



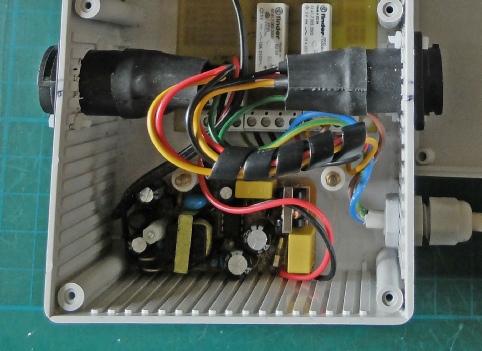
2 amp, 5 volt Power supply removed from its original case.

Next I construct an I2C temperature sensor.
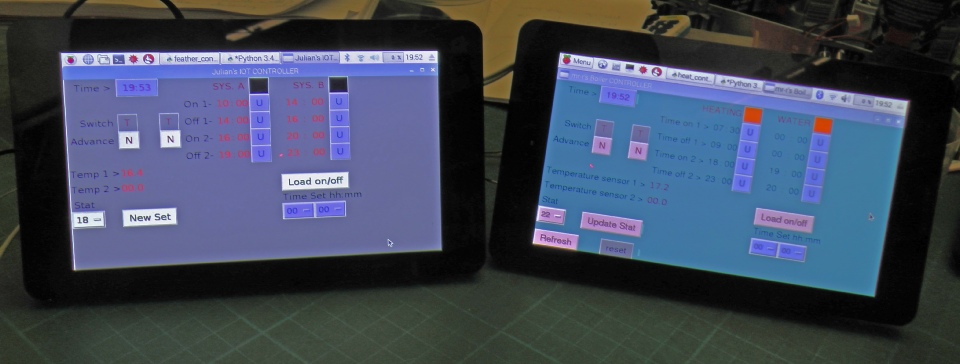
The Raspberry Pi on the left is running a cleaned up version of my original Python software which is supervising the new controller. I’m hoping to extend this so it can be switched between the old and the new controllers.